余乐乐, 王仲根, 李 京, 沈志俊
(安徽理工大学 电气与信息工程学院, 安徽 淮南 232001)
与直流电机和感应电机相比,永磁同步电机PMSM(permanent magnet synchronous motor)具有结构简单、功率密度高、能效高、运行可靠等优点。随着永磁材料成本的降低和控制技术的发展,永磁同步电机在各种领域得到了广泛的应用[1-3]。PMSM的控制方法通常采用矢量控制,矢量控制需要实时获得转子位置。传统方法通过位置传感器获取转子位置,但安装传感器会影响系统控制稳定性,增加成本。模型参考自适应(MRAS)控制算法是实现高性能控制的算法之一[4]。文献[5]提出一种改进的灰狼优化(GWO)算法,通过构造积分型非奇异快速终端滑模面,用非线性指数函数来代替传统滑模MRAS中的开关函数。然后,用改进的GWO算法,对滑模面参数进行全局寻优。文献[6]提出一种采用扩张状态观测器代替传统PI观测器,以提高转子位置的估计精度和减小负载转矩扰动对系统的影响。文献[7]提出一种新型超螺旋滑模自适应观测器(STA-AO),在MRAS结构的基础上加入了反馈校正环节,在STA-AO中引入超螺旋滑模算法替代观测器中的PI自适应机构,提高了观测器的鲁棒性。文献[8]提出一种新的线性补偿器,推导出了新的转速自适应律,使得MRAS能够在宽速度范围内对转子位置和转速准确辨识。这些方法的提出有效实现了调速系统的高性能控制,它们有的使用了复杂的算法,使观测器设计复杂;
有的缺乏通用性,在工程应用中存在诸多局限[9-11]。
本文提出一种基于三阶PI的MRAS观测器设计方案,在传统MRAS中引入三阶PI,以提高系统的跟踪精度和鲁棒性,抑制滑模抖振,最后通过仿真结果验证本文方案的优越性与可行性。
对于表贴式三相PMSM,在d-q坐标系下的状态空间表达式为:
(1)

式(1)的矩阵形式可表示为:
(2)
则可调模型可表示为:
(3)

式(3)的状态空间表达式为:
(4)
定义广义误差为:
(5)
由式(1)和式(4)相减可得电流估计误差表达式:
(6)

将式(6)写成状态空间表达式,可得到电流估计误差状态空间表达式:
(7)

(8)

(9)
将MRAS观测器中引入三阶PI自适应律代替传统PI自适应律,有效提高了系统的动静态性能。三阶PI框图如图1所示。

图1 三阶PI框图
由图1可知,三阶PI系统闭环传递函数:
(10)
误差传递函数为:
(11)
单位阶跃信号输入时的稳态误差为:
(12)
相较于传统PI自适应律(Ⅰ型系统),本文设计的Ⅲ型系统有更好的动静态性能。针对三阶PI系统闭环传递函数H0(s),参数a过小会降低系统的收敛速度,a变大会减少系统的上升时间,提高系统的动态性能。但a过大则会使系统超调过大;
参数b过小则会使系统不稳定,b增大会减少系统的上升时间,加快系统的收敛速度;
当参数c过大时,会降低系统的收敛速度。
3.1 仿真模型的搭建
为验证本文设计的基于三阶PI的MRAS观测器的性能效果,在MATLAB/Simulink环境下进行仿真研究,控制对象选取SPMSM,并且采用id=0控制。在仿真研究中,将与传统MRAS进行比较。
选用的SPMSM参数:极对数Pn=4;
定子电感Ls=8.5 mH;
定子电阻R=2.875 Ω;
磁链ψf=0.171 Wb;
转动惯量J=4.8×10-6kg·m2;
阻尼系数B=0。基于三阶PI的MRAS观测器的实现框图如图2所示。

图2 基于三阶PI的MRAS观测器的实现框图
3.2 仿真结果分析
恒载变速分析:在t=0.2 s时,Nref由400 r/min骤变为700 r/min,带2 N·m恒负载。仿真时间为0.3 s。传统MRAS和基于三阶PI的MRAS的iq响应曲线如图3所示,转速响应如图4所示。
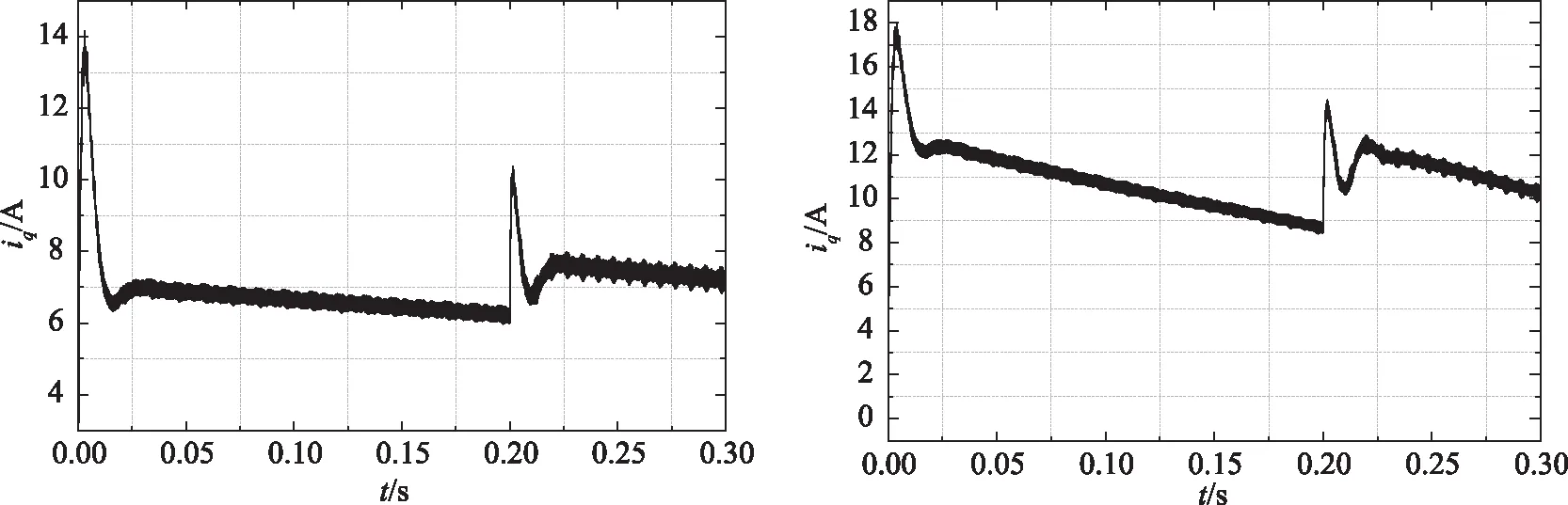
(a)基于三阶PI的MRAS的iq响应 (b)传统MRAS的iq响应图3 两种滑模观测器的iq响应

(a)基于三阶PI的MRAS的转速响应 (b)传统MRAS的转速响应图4 两种滑模观测器的转速响应
由图3可以看出,电机启动运行时,传统MRAS的iq超调至18 A,在0.2 s电机变速之前,电流iq处于骤减状态,不能趋于稳定。而基于三阶PI的MRAS观测器经过极短时间使电流iq达到稳定状态。在0.2 s时,电机转速由600 r/min骤变为400 r/min,再次骤变为700 r/min。由图4可知,负载恒定转速发生骤变,图4(a)收敛速度更快,抖振更小,具有较高的鲁棒性。
恒负载变参数分析:初始转速Nref=600 r/min,带3 N·m恒负载。在t=0.2 s时,电机参数由R骤变为2R。仿真时间为0.3 s。传统MRAS和基于三阶PI的MRAS的转速误差响应如图5所示。Te响应曲线如图6所示。
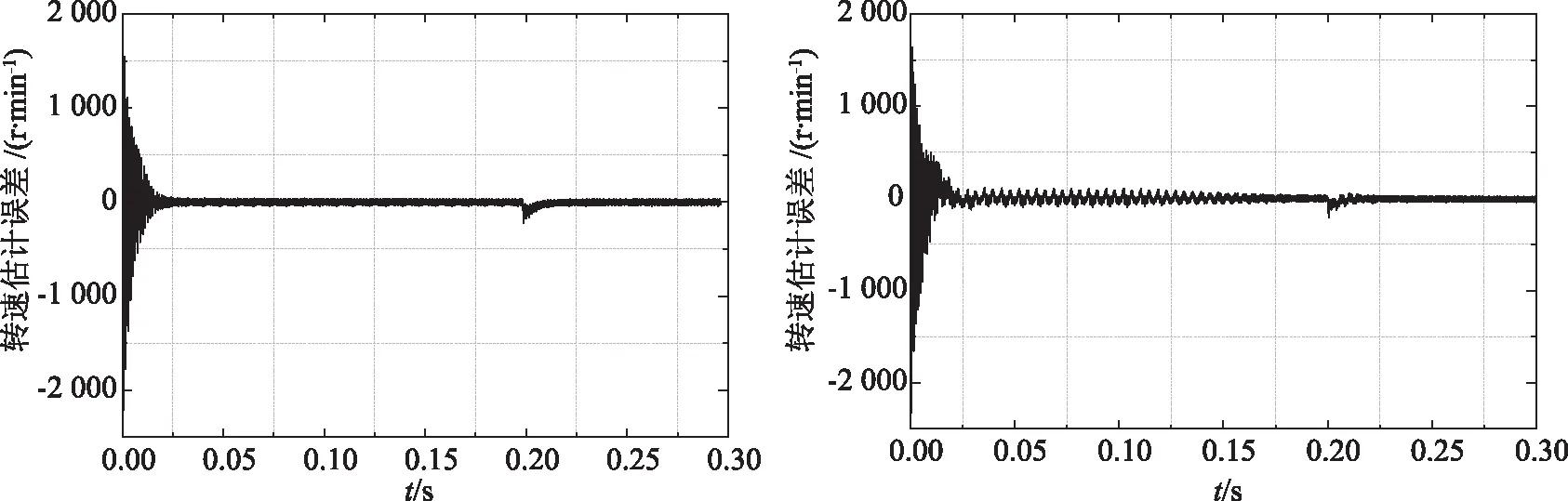
(a)基于三阶PI的MRAS的转速误差 (b)传统MRAS的转速误差图5 转速误差响应

(a)基于三阶PI的MRAS的Te响应 (b)传统MRAS的Te响应图6 Te响应对比图
电机带负载启动时,经过极短时间完成收敛至设定值,而传统MRAS始终处于波动状态。与传统MRAS相比较,基于三阶PI的MRAS的Te收敛速度提高50%。在t=0.2 s时,电机参数由R骤变为2R,图5(a)的暂态时间比传统MRAS缩短了40%,而图5(b)转速误差抖动大,收敛速度慢;
图6(a)Te响应时间可以忽略不计,参数R的变化对基于三阶PI的MRAS的控制系统影响极小。图6(b)中Te响应速度慢,控制系统对参数变化敏感。
仿真结果表明,负载恒定参数突变时,本文设计的观测器不仅能够有效抑制系统抖动,而且还具有良好的鲁棒性和动静态性能。
针对PMSM无传感器控制在运行过程中因负载、转速和参数变化而引起的动态跟踪误差大和鲁棒性差的问题,提出一种基于三阶PI的MRAS观测器,在传统MRAS中引入三阶PI,可以有效消除突发扰动时的跟踪误差,抑制滑模抖振,使系统具有良好的稳定性和鲁棒性。对传统MRAS与所设计的观测器进行仿真实验对比,本文提出的观测器抑制外部扰动能力强、对电机内部参数变化不敏感、跟踪精度高以及抖动弱化明显。
猜你喜欢三阶框图鲁棒性三阶非线性微分方程周期解的非退化和存在唯一性数学物理学报(2022年2期)2022-04-26武汉轨道交通重点车站识别及网络鲁棒性研究科技研究·理论版(2021年22期)2021-04-18荒漠绿洲区潜在生态网络增边优化鲁棒性分析农业机械学报(2020年2期)2020-03-09捷豹I-PACE纯电动汽车高压蓄电池充电系统(三)汽车维修技师(2019年7期)2020-01-16基于确定性指标的弦支结构鲁棒性评价中华建设(2019年7期)2019-08-27电路图2017年凯迪拉克XT5汽车维修技师(2018年11期)2018-05-11新型三阶TVD限制器性能分析北京航空航天大学学报(2017年4期)2017-11-23算法框图的补全中学生数理化·高一版(2017年1期)2017-04-25巧填三阶幻方中学生数理化·七年级数学人教版(2017年2期)2017-03-25一种基于三维小波变换的鲁棒视频水印方案电脑知识与技术(2016年28期)2016-12-21


