孙曼曼,陈珍萍*,李海峰,付保川
(苏州科技大学电子与信息工程学院,江苏 苏州 215009)
随着现代自动控制技术、通信技术以及传感技术的飞速发展,网联自动驾驶车辆已成为当今智能交通系统的研究热点[1]。基于自主式与网联式,网联自动驾驶车辆实现对周围交通环境与邻近车辆的监测[2],旨在降低交通事故,提升城市交通效率。通过车载传感器,自主式感知能够监测自身及周边车辆的行驶状态;
而网联式感知则依靠现代通信技术,完成自身与周边车辆、道路交通设施之间的信息交互[3]。因此,网联自动驾驶车辆能够获得实时的周围交通环境信息,并通过数据分析处理,自主地提前做出决策规划,指导驾驶行为[4]。
车辆运行过程中主要存在跟驰、换道两种驾驶行为。对比两种行为,车辆换道考虑的周边因素更多,决策执行过程相对更复杂。根据相关统计,由车辆换道引起的交通安全事故约占总交通事故的5%,且近年来呈上升趋势[5]。针对网联自动驾驶车辆的协同换道研究已得到国内外专家学者的广泛关注。
在文献[6]中,Jula等人制定了车辆换道时的安全准则,以此来判断换道的可行性;
Kanaris等人在文献[7]中针对突发情况,研究出一种新型换道安全判断标准;
谭云龙在道路合流区换道过程中分析车辆协作的影响现状,给出了换道间隙接受模型[8];
丁云洁等人以周围交通环境为输入变量,阐明换道决策行为的影响因素,构建基于隐马尔可夫理论的多车换道预测模型[9];
在文献[10]中,徐远新等人根据隐马尔科夫理论,考虑前车状态,建立了前车换道预测模型。
综上,对网联自动驾驶车辆协同换道研究中,大都致力于换道稳定性、安全性等基本性能的分析,但对行车舒适性研究较少,往往忽略了舒适性在交通流速度波动上的体现。而且,对多车因同时换道产生干扰的研究也尚未成熟。因此,本文选取车辆的换道行为为研究内容,对车辆进行博弈分析,建立面向网联自动驾驶车辆的多车协同换道策略,在现有的交通流运行安全性与稳定性的基础上,增加舒适性,以避免发生频繁、不合理的换道行为,提升行车舒适感。
2.1 网联自动驾驶车辆假设
网联自动驾驶车辆制定驾驶策略的过程和人脑作出驾驶的过程必然不同[11]。因此,本文对运行车辆作出如下假设:
假设1:忽略横向速度与横向加速度;
假设2:不考虑通信延迟和信息传输误差。
2.2 换道场景设定
网联自动驾驶车辆换道涉及到的车辆及车道包含有:当前车道(Current Lane,CL)的主车(Subject Vehicle,SV)、前车(Preceding Vehicle,PV)和后车(Following Vehicle,FV);
目标车道(Target Lane,TL)的前车(Putative Leading Vehicle,PLV)和后车(Putative Following Vehicle,PFV)。换道场景如图1。
图1中,SV的通信距离内,假设在CL上有有nc辆后车,记为集合NCT;
TL上有nT辆后车,记为集合NTL。这些车辆与SV的相对纵向位置满足下式

图1 换道场景图

(1)
式中,L为SV的通信距离;
xSV为SV的当前位置;
xFVi和xPFVi分别为FVi和PFVi的当前位置,其中i取1、2、3……
2.3 网联自动驾驶车辆换道流程
环境感知单元、车载决策单元、底层控制单元和网络通信单元构成网联自动驾驶车辆系统。其换道步骤可总结如下,换道流程如图2。
1)为防止频繁换道,首先判断SV在30s内是否有换道行为,若有,则SV不换道,跳转至步骤五,若没有,则进入步骤2);

图2 换道系统流程图
2)依据初始输入状态信息,SV执行单车期望换道策略。若该决策为不换道,跳转至步骤五,若决策为换道,则进入步骤3);
3)判断SV与周围车辆的换道决策间是否存在冲突,若不存在,则期望换道策略为最终策略,跳转至步骤五,若存在,则进入步骤4);
4)由相互冲突的换道决策,建立协同换道策略,并将其作为最终换道策略,进入步骤5);
5)最终换道策略由车载决策单元传递给周边车辆,同时发送给底层控制单元。
3.1 车辆跟随模型
为分析主车换道后周边车辆的加速度,以智能驾驶员模型(Intelligent Driver Model,IDM)为车辆跟随模型[13]。IDM表达式如下


(2)
式中,aSV为SV的加速度;
a为最大加速度;
vSV为SV的速度;
δ是加速度指数;
sSV是SV的实际跟车距离;
T是安全车头时距;
v0为期望速度;
ΔvSV为SV与其前车的速度差;
so为静止安全距离;
b为舒适减速度。
分别将车辆SV-1与其前车SV-2的车间距、相对速度差记为sSV-1、ΔvSV-1。以此类推,sSV-j、ΔvSV-j分别为SV前j辆车与前j+1辆车的车间距及相对速度差。在原模型的基础上,Treiber将IDM扩展为多车模式[14],考虑三辆前车对SV跟随行为的影响,SV加速度按照下式估计

(3)
式中,mj=ρjTj,mj为权重系数,ρj和Tj分别代表车辆SV-j与其前车的运动相近程度和信息可靠度,由假设2可知,Tj=1。
3.2 换道可行性判断
3.2.1 速度收益
本文在激励模型中定义速度收益函数,以判断换道的收益标准。速度收益函数定义如下[15]

(4)
3.2.2 舒适性收益
本文以相邻步长间加速度的变化来衡量车辆行驶的舒适性收益,以描述加速度变化幅度,其表达式如下
m′SV(TL)=|aSV(t)-aSV(t-1)|

(5)
式中,m′SV(TL)是SV换道到TL的舒适性收益,aSV(t-1)为上一步长SV的加速度,aFVi(t-1)和aPFVi(t-1)分别为上一步长FVi和PFVi的加速度。
3.2.3 总收益
确定了SV在换道下的速度收益和舒适性收益之后,对两收益函数归一化处理,计算出总收益,进而确定最终换道策略。总收益定义如下
USV=αfacc(mSV(TL))+βfcom(m′SV(TL))
(6)
式中,USV是总收益,facc(mSV(TL))和fcom(m′SV(TL))分别为对加速度和舒适性的归一化函数,α、β分别是SV在速度收益、舒适性收益之间的权重系数。最优目标车道的确定即转化为以下优化求解问题
TL*=arg maxTL∈N(SV)USV
(7)

(8)
USV>Δath
(9)
式中,bsafe为最大安全减速度,取bsafe=2m/s2;
Δath是给定的收益阈值,当SV的收益大于Δath且满足安全准则时才换道。在优化问题(7)中,优化解TL*对应最优目标车道的换道行为。
协同换道是为消除主车和周边车辆的单车期望换道决策之间的冲突而作出的策略,以避免多车因换道进入同一个目标间隙而发生碰撞事故。但协同换道不应仅关注车于车之间的换道冲突,还应最大化提高交通流运行效率。因此,需对同时换道的车辆进行协调。本文采用博弈论的方法对车辆间的竞争与协作关系探究分析,从而对协同换道的车辆分类与建模。
4.1 车辆协同换道分类
本文只关注两车之间的协同换道博弈,其情形主要分为三类:(a)SV和原车道前车目标车道、目标间隙相同;
(b)SV和原车道前车目标车道相同、目标间隙相邻;
(c)SV和目标车道前车交叉换道。协同换道博弈情形如图3。

图3 协同换道博弈情形
4.2 车辆协同换道模型构建
根据3.1节描述的协同换道分类,该协同换道是一个静态博弈的策略问题[16],可用参与人、策略和支付来描述。参与车辆的策略集合均为{换道,不换道},换道记为1,不换道记为0。为方便描述,对下文涉及到的相关变量定义如下:

Case1:SV与PV的目标车道、目标间隙相同
该博弈中基本元素如下分析。
1) 参与人:SV和原车道前车PV;
2) 策略:{换道,不换道};
3)支付:用SV和周边车辆的加速度变化值表示两车在不同策略下的总收益。
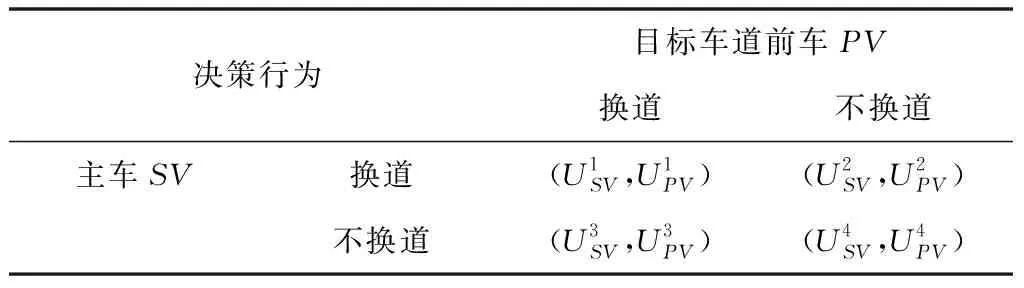
表1 SV和PV的协同换道博弈矩阵
策略组合1:SV和PV同时换道


(10)
若式(10)成立,则由式(9)和(15)判断两车同时换道时,SV和PV的换道总收益是否均大于Δath。其过程如下。令

(11)
g′(TL)=aSV(t)-aSV(t-1)
(12)


(13)

+|g′(TL)|
(14)
则有:

(15)

策略组合2:SV换道、PV不换道

策略组合3:SV不换道、PV换道

策略组合4:SV和PV均不换道
两车均不换道,SV和PV的收益函数如下:

(16)

(17)
Case2:SV与PV的目标车道相同、目标间隙相邻
Case2中的参与人、策略、支付、博弈矩阵及策略组合同Case1,这里不再赘述。
策略组合1:SV和PV同时换道
组合1中,对于SV,其目标间隙可能改变,需重新对安全性分析。然后分别根据式(9)和(20)判断SV和PV的换道总收益是否均大于Δath。令

+ηg(TL)
(18)

+|g′(TL)|
(19)
则有

(20)

Case2的策略组合2、3和4参考Case1。
Case3:SV和PLV交叉协同换道


表2 SV和PLV的协同换道博弈矩阵
策略组合1:SV和PLV同时换道
组合1中SV和PLV的目标间隙会增大,两车换道的安全性不需重新判断。根据式(9)和(23)分别判断SV和PLV的换道总收益是否均大于Δath。令

+ηg(TL)
(21)

+|g′(TL)|
(22)
则有

(23)
Case3中策略组合2、3和4参考Case1。
4.3 模型求解
网联自动驾驶车辆能够根据换道策略预估自身和周边车辆下一时刻的驾驶信息。因此,双矩阵中的元素都能计算得出。考虑到其中元素的值随时间变化,需探究一种使车辆在任何状况下都能选择最优策略的方法[17]。
其步骤可总结如下:
1)对博弈中参与车辆i=1、2分别构建支付矩阵Ui;

(24)

(25)
在矩阵U1和U2中,U1k和U2k分别表示第一、二个参与车辆在第k个换道策略下的收益。
2)忽略矩阵U1中的前两行,得到矩阵B1;
删除矩阵U2中的第一、三行,获得矩阵B2。

(26)

(27)
3)将Bi的最小列标号对应的策略组合选取到Ri。
4)根据式(28)获得R中的策略组合,即为最优策略。

(28)
5.1 仿真场景及参数设置
仿真场景为单向三车道的基本路段。实验设置基于两组跟驰与换道策略组合模拟的车辆交通流场景。模型组合见表3。
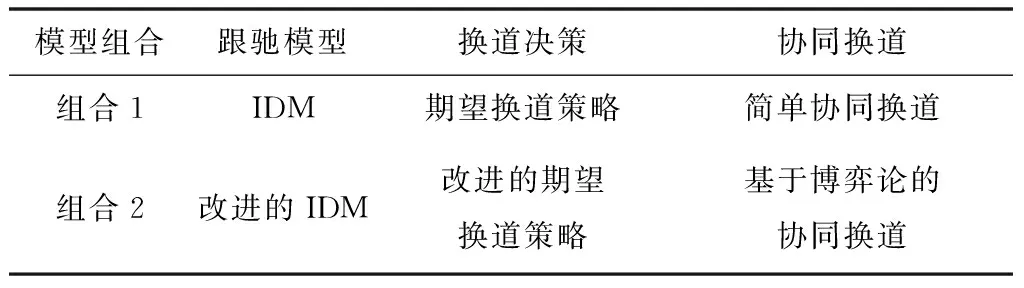
表3 换道模型组合
初始输入交通流量为300Veh/h-2000Veh/h依次变化。当初始道路密度小于20Veh/km时,初始输入车速为v0。当初始道路密度不小于20Veh/km时,初始输入车速为17m/s。每次仿真时长为250s,仿真中涉及到的参数见表4。
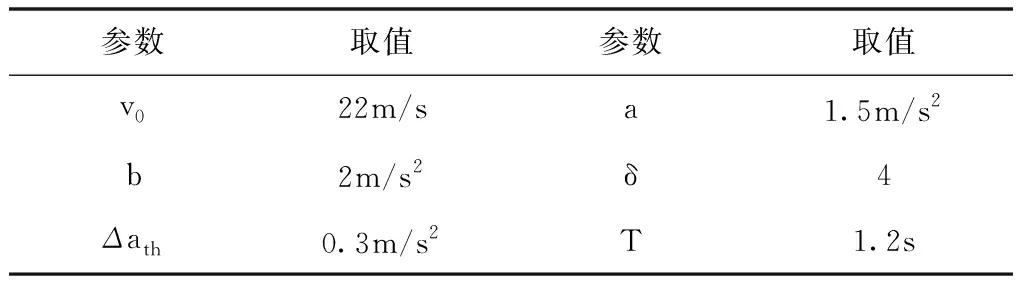
表4 模型参数
5.2 结果与分析
本节基于Matlab对组合1、2进行数值仿真对比,从交通流舒适性、稳定性及安全性等方面验证所提策略的有效性。
在换道策略中,礼貌系数是换道率的影响因素之一,反映了主车的利他主义程度。若取η=0时,表示主车只考虑自身收益;
若取0<η<1,表示主车既兼顾自身收益又注意对后车的影响;
若取η>1,表示完全利他主义。设置不同的礼貌系数,同时用不同的颜色区分速度大小,图中颜色值越大,车辆速度越快。发现礼貌系数η=0.1时的时空轨迹图均质性最好,其次是η=1时,η=0时最差。并且η=0.1和η=1时,两组合都未出现车速为零的现象,但η=0时明显出现了停车现象。表明η=0.1时,车辆既能获得更快更平稳的驾驶速度,又能保证自身和周边车辆的舒适安全行驶。时空轨迹如图4、图5和图6。
对比图4,组合1以车速5m/s运行的时间达70s,组合2只有40s,组合2中的车辆以较高速度行驶的情况比例明显高于组合1,且交通流稳定性较好;
图5中,组合2的低速运行时间大约比组合1少30s,拥堵范围更小,交通流整体制动幅度不大;
图6中,两组合都出现了停车现象,但组合1拥堵更为严重,尤其是第100秒开始,出现大范围停车现象,而组合2仍能以5m/s的车速小范围内移动。表明本文所提的换道策略能够提升道路通行能力,同时使车速保持较好的平稳性,有效降低车辆整体制动幅度,提升行车舒适感。

图4 η=0.1时车辆时空轨迹图

图5 η=1时车辆时空轨迹图
道路密度和平均速度分析中,红色折线和绿色折线分别为组合1和组合2的道路密度相对应的车辆平均速度。对比发现,当道路密度小于0.025Veh/m时,两种组合的平均速度差异很小,随着道路密度的逐渐增大,组合2的平均速度开始显著大于并一直大于组合1,且速度变化率更为缓慢。当道路密度在0.025Veh/m-0.040Veh/m时,组合1的平均车速大幅下降。当道路密度高于0.177Veh/m时,因密度过高导致交通处于致密堵塞状态,两种组合下的平均速度均处于较低水平。因此,本文提出的换道策略,在提高交通通行效率的同时能够有效减少车辆运行的整体制动幅度,提高行车舒适感。平均速度-交通密度图如图7。

图6 η=0时车辆时空轨迹图
碰撞时间(Time to Collision,TTC)是指车辆在某行驶中,主车用于调整自身速度以避免和前车碰撞的时间。当TTC-1≤0时,表示没有碰撞危险,当TTC-1>0时,碰撞的危险性随TTC-1的増大而增加。仿真结果显示,组合2的碰撞危险性明显低于组合1。说明本文提出的换道策略能够提高车辆换道的安全性。两模型组合下的车辆碰撞时间倒数曲线如图8。

图7 平均速度-交通密度分布图

图8 车辆碰撞时间倒数
针对现有车辆协同换道存在运行制动幅度大、安全性差、拥堵严重等问题,本文在舒适安全换道需求驱动下,提出了一种基于博弈论的网联自动驾驶协同换道策略。将舒适性收益引入速度收益中,形成综合考虑两收益函数的单车换道策略;
采用双矩阵算法研究协同换道运行方式,探究基于博弈论的多车协同换道策略。仿真结果表明,所提策略在保证车辆安全稳定换道的前提下,提供了更为舒适的行车体验。但外界干扰会增加车辆决策分析的不确定性和随机性,在未来的研究中,将对模型进行完善,进一步改进车辆行驶状态。



